

SucheHinweis: Die „Schnellsuche“ findet nur Text in den angezeigten
Feldern; nicht in Abstracts oder Schlagwörtern. Der Suchbegriff muss mindestens
3 Buchstaben lang sein.
2026
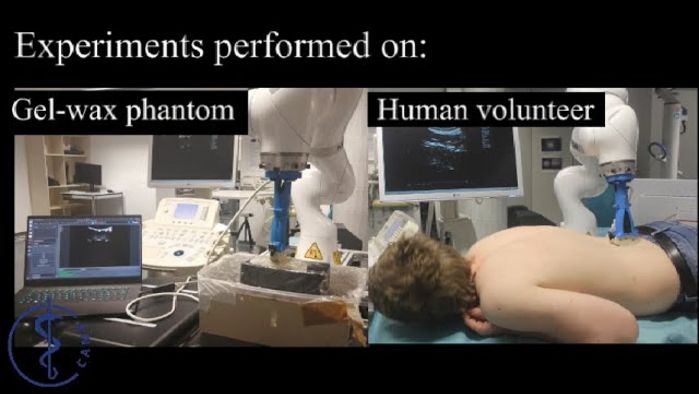
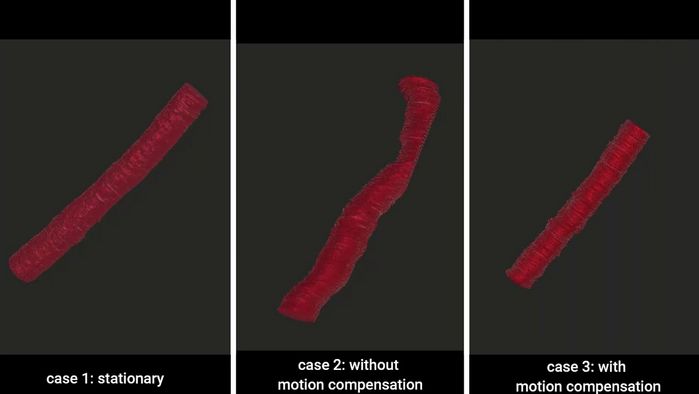
- Ultrasound-Guided Real-Time Spinal Motion Visualization for Spinal Instability Assessment. arXiv preprint arXiv:2602.12917, 2026 mehr…
2025
- Synomaly noise and multi-stage diffusion: A novel approach for unsupervised anomaly detection in medical images. Medical Image Analysis, 2025, 103737 mehr…
- Gaze-Guided Robotic Vascular Ultrasound Leveraging Human Intention Estimation. IEEE Robotics and Automation Letters 10 (4), 2025, 3078-3085 mehr…
- Robotic CBCT meets robotic ultrasound. International Journal of Computer Assisted Radiology and Surgery 20 (6), 2025, 1049--1057 mehr…
- Semantic scene graph for ultrasound image explanation and scanning guidance. International Conference on Medical Image Computing and Computer-Assisted Intervention, 2025 mehr…
- Speckle2Self: Self-supervised ultrasound speckle reduction without clean data. Medical Image Analysis 106, 2025, 103755 mehr…
- Intelligent Virtual Sonographer (IVS): Enhancing Physician-Robot-Patient Communication. In: Lecture Notes in Computer Science. Springer Nature Switzerland, 2025 mehr…
- Intelligent Virtual Sonographer (IVS): Enhancing Physician-Robot-Patient Communication. International Conference on Medical Image Computing and Computer-Assisted Intervention, 2025 mehr…
2024
- Machine Learning in Robotic Ultrasound Imaging: Challenges and Perspectives. Annual Review of Control, Robotics, and Autonomous Systems 7 (1), 2024, 335-357 mehr…
- Machine Learning in Robotic Ultrasound Imaging: Challenges and Perspectives. Annual Review of Control, Robotics, and Autonomous Systems 7 (1), 2024 mehr…
- Machine Learning in Robotic Ultrasound Imaging: Challenges and Perspectives. Annual Review of Control, Robotics, and Autonomous Systems 7 (1), 2024 mehr…
- Robot-Assisted Deep Venous Thrombosis Ultrasound Examination Using Virtual Fixture. IEEE Transactions on Automation Science and Engineering, 2024, 1-12 mehr…
- Intelligent robotic sonographer: Mutual information-based disentangled reward learning from few demonstrations. The International Journal of Robotics Research, 2024 mehr…
- Intelligent robotic sonographer: Mutual information-based disentangled reward learning from few demonstrations. The International Journal of Robotics Research 43 (7), 2024, 981-1002 mehr…
- DopUS-Net: Quality-Aware Robotic Ultrasound Imaging Based on Doppler Signal. IEEE Transactions on Automation Science and Engineering 21 (3), 2024, 3229-3242 mehr…
- Class-Aware Cartilage Segmentation for Autonomous US-CT Registration in Robotic Intercostal Ultrasound Imaging. IEEE Transactions on Automation Science and Engineering, 2024, 1-13 mehr…
- Needle Segmentation Using GAN: Restoring Thin Instrument Visibility in Robotic Ultrasound. IEEE Transactions on Instrumentation and Measurement 73, 2024, 1-11 mehr…
- Ultrasound Report Generation with Cross-Modality Feature Alignment via Unsupervised Guidance. IEEE Transactions on Medical Imaging, 2024, 1-1 mehr…
- Review of robotic systems for thoracoabdominal puncture interventional surgery. APL Bioengineering 8 (2), 2024 mehr…
- Magnetic Soft Microrobot Design for Cell Grasping and Transportation. Cyborg and Bionic Systems 5, 2024 mehr…
2023
- MI-SegNet: Mutual Information-Based US Segmentation for Unseen Domain Generalization. In: Lecture Notes in Computer Science. Springer Nature Switzerland, 2023 mehr…
- MI-SegNet: Mutual Information-Based US Segmentation for Unseen Domain Generalization. In: MICCAI. Springer Nature Switzerland, 2023 mehr…
- Motion Magnification in Robotic Sonography: Enabling Pulsation-Aware Artery Segmentation. 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2023 mehr…
- Motion Magnification in Robotic Sonography: Enabling Pulsation-Aware Artery Segmentation. 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2023 mehr…
- Thoracic Cartilage Ultrasound-CT Registration Using Dense Skeleton Graph. 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2023 mehr…
- Skeleton Graph-Based Ultrasound-CT Non-Rigid Registration. IEEE Robotics and Automation Letters 8 (8), 2023, 4394-4401 mehr…
- Robotic ultrasound imaging: State-of-the-art and future perspectives. Medical Image Analysis 89, 2023, 102878 mehr…
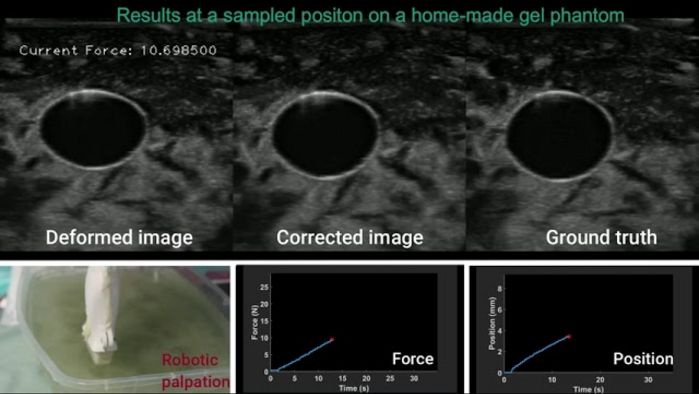
- DefCor-Net: Physics-aware ultrasound deformation correction. Medical Image Analysis 90, 2023, 102923 mehr…
- The potential of 'Segment Anything' (SAM) for universal intelligent ultrasound image guidance. BioScience Trends 17 (3), 2023, 230-233 mehr…
- Needle detection and localisation for robot‐assisted subretinal injection using deep learning. CAAI Transactions on Intelligence Technology, 2023 mehr…
- Theoretical error analysis of spotlight-based instrument localization for retinal surgery. Robotica 41 (5), 2023, 1536-1549 mehr…
- Theoretical error analysis of spotlight-based instrument localization for retinal surgery. Robotica 41 (5), 2023, 1536-1549 mehr…
2022
- VesNet-RL: Simulation-Based Reinforcement Learning for Real-World US Probe Navigation. IEEE Robotics and Automation Letters 7 (3), 2022, 6638-6645 mehr…
- Deep Reinforcement Learning Based Trajectory Planning Under Uncertain Constraints. Frontiers in Neurorobotics 16, 2022 mehr…
- Precise Repositioning of Robotic Ultrasound: Improving Registration-Based Motion Compensation Using Ultrasound Confidence Optimization. IEEE Transactions on Instrumentation and Measurement 71, 2022, 1-11 mehr…
- Towards Autonomous Atlas-Based Ultrasound Acquisitions in Presence of Articulated Motion. IEEE Robotics and Automation Letters 7 (3), 2022, 7423-7430 mehr…
- Autonomous Robotic Screening of Tubular Structures Based Only on Real-Time Ultrasound Imaging Feedback. IEEE Transactions on Industrial Electronics 69 (7), 2022, 7064-7075 mehr…
2021
- Motion-Aware Robotic 3D Ultrasound. 2021 IEEE International Conference on Robotics and Automation, 2021 mehr…
- Automatic Force-Based Probe Positioning for Precise Robotic Ultrasound Acquisition. IEEE Transactions on Industrial Electronics 68 (11), 2021, 11200-11211 mehr…
- Deformation-Aware Robotic 3D Ultrasound. IEEE Robotics and Automation Letters 6 (4), 2021, 7675-7682 mehr…
2020
- Automatic Normal Positioning of Robotic Ultrasound Probe Based Only on Confidence Map Optimization and Force Measurement. IEEE Robotics and Automation Letters 5 (2), 2020, 1342-1349 mehr…
- Model-Based Compensation of Moving Tissue for State Recognition in Robotic-Assisted Pedicle Drilling. IEEE Transactions on Medical Robotics and Bionics 2 (3), 2020, 463-473 mehr…
